arbeitspakete
Hardwareengineering:
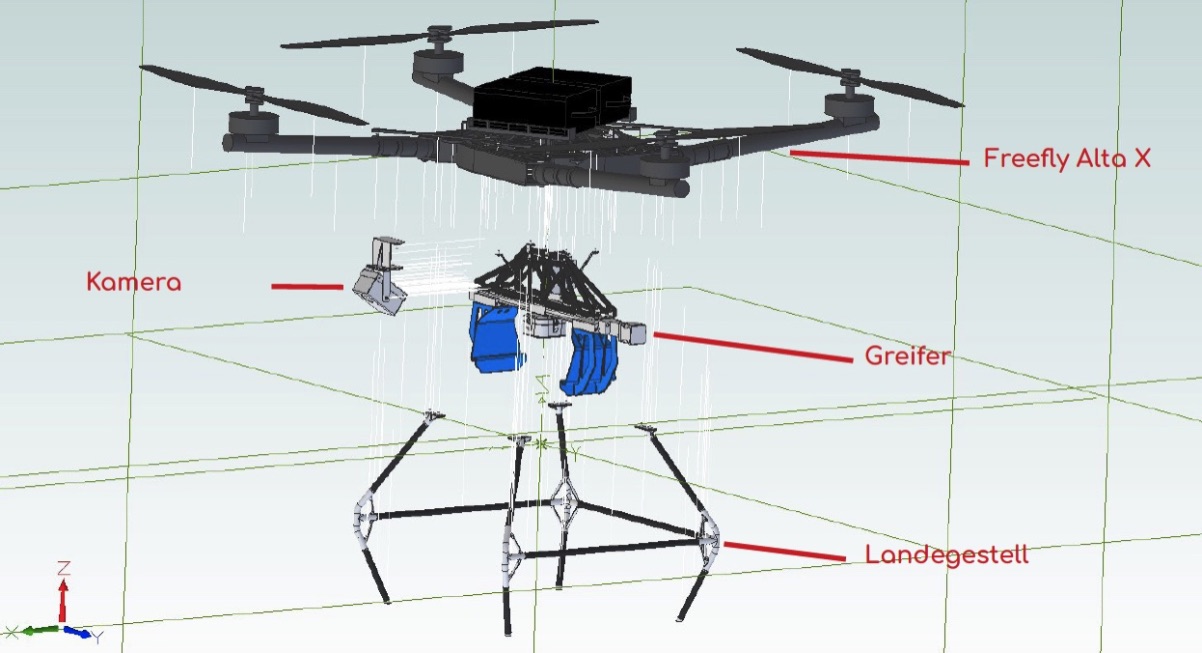
Automatisierte Transportdrohne
Mit einer Spannweite von mehr als 220 cm, vier tief summenden Rotoren sowie senkrechten Start- und Landemanövern stellt die Transportdrohne die wahrscheinlich aufsehenerregendste Komponente des mobil-e-Hub Systems dar. Doch wie wird aus einem manuell gesteuertem Drohnenmodell, das normalerweise nur Kameras transportiert, eine vollautomatisierte und präzise agierende Transportdrohne?
Konsortialpartner doks. innovation hat dazu einen Prototypen entwickelt, der es erlaubt die MeH-Transportboxen an den Hubs aufzunehmen und abzusetzen sowie diese zwischen den einzelnen Hubs auf dem Luftweg zu transportieren. Dabei wird das ausgewählte Drohnenmodell Freefly Alta X durch zahlreiche Hard- und Softwarekomponenten erweitert. Neben dem angebrachten Kamerasystem, das zur Navigation dient, sowie verschiedenen Rechen- und Kommunikationsmodulen zur Steuerung des Systems, sticht vor allem das Landegestell und die Greifvorrichtung ins Auge. Diese beiden Komponenten ermöglichen auch bei maximaler Zuladung von 7,6 KG präzise und stabile Landungen sowie einen sicheren Transport der MeH-Boxen. Das Landegestell dient hierbei nicht nur zum Aufsetzen auf den Hubs sondern erfüllt auch eine wichtige Aufgabe beim präzisen Absetzen und Aufnehmen der Transportbox. Dazu gleiten die vier Füße des Landegestells über eine auf der Landeplattform angebrachte Arretierungsvorrichtung millimetergenau in die benötigte Position. Ist diese erreicht, kommt die vom Projektteam entwickelte Greifvorrichtung zum Einsatz: Die beiden Greifarme werden über eine Linearführung in die seitlichen Aussparungen der Transportbox gefahren. Um bei Turbulenzen oder starker Vibration während des Flugs ein Verrutschen oder Herausspringen der Box aus dem Griff der beiden Arme zu verhindern, wurde der Greifmechanismus mit einer weiteren Komponente ergänzt. Ein Stempelkopf, der von der Unterseite der Drohne ausgefahren wird, drückt während des Flugs auf die Oberseite der MeH-Transportbox und fixiert diese dauerhaft. Ist der jeweilige Zielort des Transportflugs erreicht und der Landeanflug abgeschlossen, werden Stempelkopf und Greifarme eingefahren und die Box auf dem Hub abgestellt.
Im Hinblick auf die Hardware stellt die Entwicklung des beschriebenen Drohnensystems zusammen mit der Transportbox und der Landeplattform einen entscheidenden Meilenstein innerhalb des Forschungsprojekts dar. Das Zusammenspiel dieser drei Komponenten wird bei der Durchführung des finalen Showcases von zentraler Bedeutung zur Abbildung des physischen, Hub-basierten Transportprozesses und dementsprechend auch zur Erreichung der übergeordneten Projektziele sein.